Gazebo에서 velodyne 3d Lidar 써보기
2024. 12. 23. 09:59ㆍROS2/기초
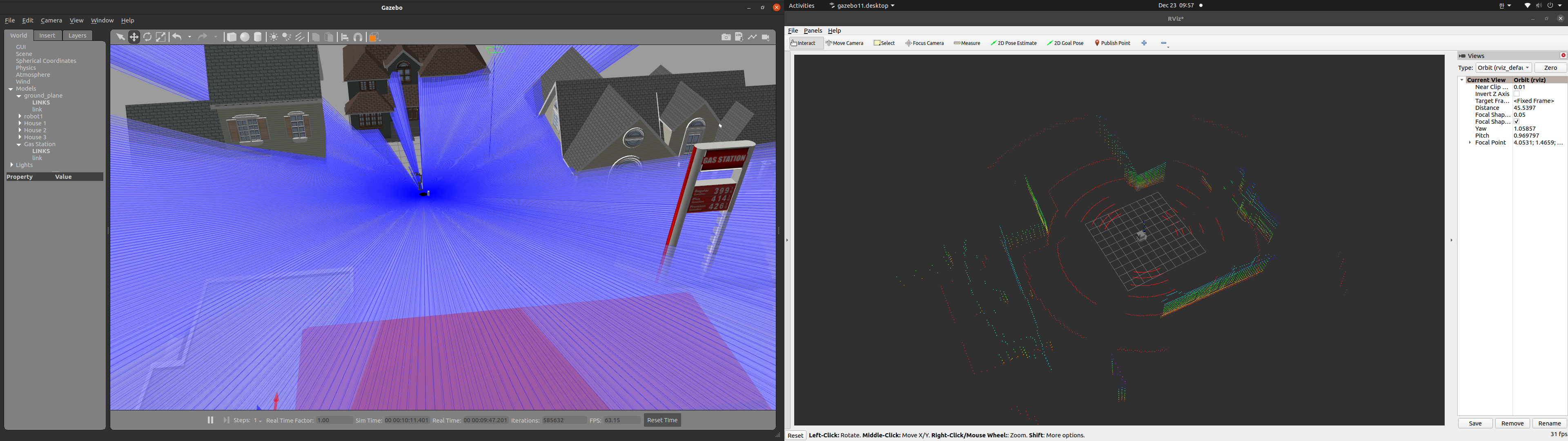
먼저 기존에 만들어 놓은 로봇의 xacro 파일에 링크와 조인트를 만들고 아래와 같은 gazebo 플러그인을 추가해주면 된다.
<gazebo reference="laser_link">
<sensor type="gpu_ray" name="velodyne-VLP16">
<visualize>true</visualize>
<update_rate>10</update_rate>
<ray>
<scan>
<horizontal>
<samples>440</samples>
<resolution>1</resolution>
<min_angle>-3.14159265</min_angle>
<max_angle>3.14159265</max_angle>
</horizontal>
<vertical>
<samples>16</samples>
<resolution>1</resolution>
<min_angle>-0.261799388</min_angle>
<max_angle> 0.261799388</max_angle>
</vertical>
</scan>
<range>
<min>0.3</min>
<max>131</max>
<resolution>0.001</resolution>
</range>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.0</stddev>
</noise>
</ray>
<plugin name="gazebo_ros_laser_controller" filename="libgazebo_ros_velodyne_laser.so">
<ros>
<!-- <namespace>/velodyne</namespace> -->
<remapping>~/out:=/velodyne_points</remapping>
</ros>
<!-- <tf_prefix>''</tf_prefix> -->
<frame_name>laser_link</frame_name>
<organize_cloud>false</organize_cloud>
<min_range>0.9</min_range>
<max_range>130.0</max_range>
<gaussian_noise>0.008</gaussian_noise>
<output_type>sensor_msgs/msg/PointCloud2</output_type>
</plugin>
</sensor>
</gazebo>
그리고 rviz2에서 pointcloud2를 추가해주고 topic으로 /velodyne_points를 선택해주면 아래와 같은 그림을 볼 수 있다.
다음번엔 터틀봇에 달아 실제 주행환경을 만들어 봐야 겠다.
'ROS2 > 기초' 카테고리의 다른 글
| ROS2(humble + 22.04) depth camera (0) | 2024.12.17 |
|---|---|
| ubuntu 24.04 ssh 설정 + docker 설정 (0) | 2024.12.06 |
| ROS2 - topic(c++) (0) | 2024.10.21 |
| ROS2 4일차(2) Maze World (0) | 2024.09.24 |
| ROS2 4일차(1) Maze World (0) | 2024.09.24 |